We use open data wherever possible, including Open Street Map for most spatial data, along with global-scale databases of open demographic data to understand urban populations.
Instead of bulky, stand-alone platforms, our platforms are all web-based, enabling us to develop highly customised, flexible frameworks that are uniquely tailored to individual applications.
Moveability
So what is moveability?
Why Moveability?
why
Moveability Analyses
what
Moveability Layers
how
Moveability for the World
where
Data Quality
accuracy
Moveability Comparisons
diversity
Contact us
Any questions, comments, queries. Please!
Why Moveability?
The importance of moveability for all cities
Thriving cities require thriving transport systems which enable and encourage the greatest range and diversity of ways for people to travel through them. More liveable cities are those in which people can freely choose the moment they leave their door which mode of transport might best suit their mood, the weather, or their spontaneous whim. Cities which offer the greatest possibilities for moveability are thriving, liveable cities. We develop tools not only to quantify the moveability of cities, but to analyse and predict how that moveability may change in response to a city’s specific visions or plans for its own more moveable future. See our example interactive maps.
Moveability Analyses
How we calculate movability
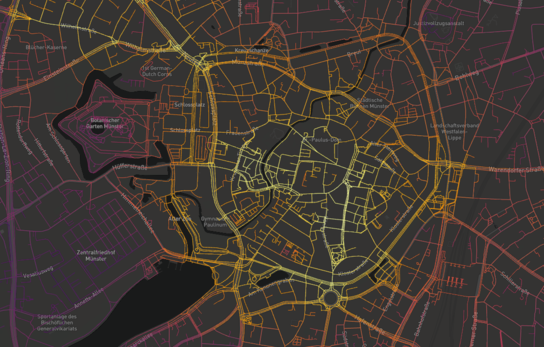
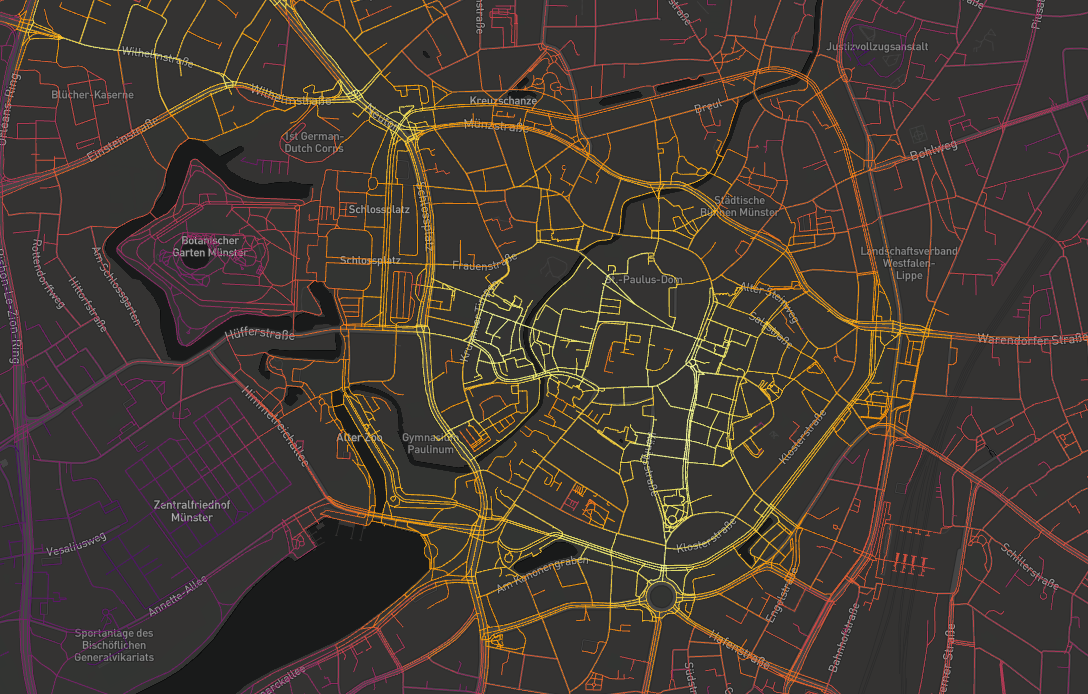
Moveability quantifies the extent to which urban structure accommodates and encourages all forms of active moveability. We quantify moveability at every single intersection within a city’s street network, starting with the total lengths of moveable streets or ways near that point. For example, 1km of street with four lanes dedicated to automobiles offers less walkable length than 1km of separated walking path, and 1km of walking path offers less cyclable length than 1km of dedicated cycleway. Moveability is also influenced by the amount of surrounding green space, as well as “blue space” in the form of water bodies. The above image shows an example of the walkability of our home city of Münster, Germany.Beyond these static views of current moveability, we also generate layers of “potential” moveability reflecting spatial mismatches between demography and infrastructure. This potential for moveability need not be directly related to moveability itself, and the ability to identify areas of high potential yet low actual moveability translates into a key tool for planning infrastructure changes to enhance moveability. It immediately enables cities to identify the “easy targets” where the gains are likely to be the greatest.
Moveability Layers
Layers of moveability
Moveability depends on purpose. I might desire moveability near my home where I walk a lot, yet not care at all about moveability near my workplace. Or the other way around. Or I might not ever ride a bike, yet walk 10km per day. Moveability comprises a range of individual layers reflecting a range of distinct purposes, such as from residential areas to educational structures, or from commercial structures to public transport infrastructure. Each of these layers generates its own spatially explicit pattern of moveability, and each of these layers is also calculated for each mode of moveability, whether walking, cycling, or whatever mode a city might consider important. See our example interactive maps.
Moveability for the World
Moveability beyond the Global North
Most analyses of moveability focus on the relatively data-rich cities of the Global North. In contrast, we strive to ensure our ability to develop accurate models for cities beyond this region, and particularly in cities which may lack the kinds of data generally presumed to be necessary for detailed analyses of moveability. To do so, we utilise several global-scale data sets notably including demographic data. We can even calculate moveability for cities which have no local data at all, by down-scaling from global-scale data to provide initial estimates before refining these through calibration against equivalent data sets.
Data Quality
The Accuracy of Our Moveability Estimates
No two cities have the same data, and not all cities have the same quality of data. We know what data we need to accurately calculate our various measures of moveability. Even more importantly, we know how to calculate the accuracy of those measures. We therefore provide a single measure for each city of the quality of available data. This measure is a simple percentage (0 to 100) quantifying the likely accuracy of the moveability statistics.
Moveability Comparisons
Different cities differ in different ways
Most analyses of moveability are restricted to a single measure (such as walkability or bikeability), in each case reducing a city to a single number. Not only do we differ through offering interactive portals to view the spatial differences in moveability across a city, but we offer a number of ways of quantifying moveability. Beyond statistics for individual modes (such as walking or cycling), we also quantify the degree of unmet potential for moveability throughout a city. A city might have a relatively low actual moveability, yet a very high unmet potential. It is likely to be relatively easy for such a city to transform itself to enable greater active moveability. In contrast, a city may have very high moveability, yet very little potential for future expansion. Increasing active moveability in such a city will likely be more difficult. Our ability to combine static snapshots of current moveability with layers of potential moveability translates into a unique ability to compare cities in ways which reflect their otherwise irreconcilable differences. Some cities may never be able to construct connected systems of “bicycle superhighways”, yet they may nevertheless have large potential cycleability, and so may respond almost as well through to much simpler changes to street properties.We are working towards a base dataset of sufficient cities to enable our first global comparison of moveability. Cities will be scored both on current states and future potential, and our preliminary analyses suggest resultant rankings will be quite different from what might be expected …